자동차 제조업체는 전자 부품 부족의 위기에 빠졌지만 지능형 자동차의 추세는 거스를 수 없습니다. 사용자에게 가장 즉각적이고 인상적인 현명함의 증거인 PEPS (Passive Entry and Passive Start) 시스템은 더 이상 하이엔드 자동차 전용의 유명한 기능이 아닙니다. 많은 자동차 제조업체, 특히 신흥 브랜드에서 중형 또는 심지어 경제적인 모델에 도입되었습니다. 2022년 상반기 전기차 판매가 100% 이상 성장하는 중국 시장에서 BYD, GAC Aion, Geely, Nio, Xpeng, Li Auto 등 주요 전기차 제조사들은 기본적으로 모든 모델에 PEPS 를 탑재했다 .

그 ECU가 우리 운전자들을 조용히 놀라게 하는 동안, 우리는 그 제작의 흔적과 미래의 전망을 조사할 생각을 해본 적이 있습니까? 길을 가자.
PEPS는 운전자에게 수동으로 잠금 해제 활동 없이 안전하게 차에 들어가는 경험을 제공합니다. 자동차의 엔진 및 HVAC 시스템은 운전자나 승객이 차에 탑승하기 전에 원격으로 시동할 수 있습니다. 모든 승객이 차에서 내리는 동안 PEPS는 자동으로 차를 잠급니다. 이러한 방식으로 자동차 사용자는 보안이 보장된 수동 진입의 편리함을 누리게 됩니다. 그래서 우리는 그것을 "수동적"이라는 단어로 명명해야 합니다.
어제: RKE 및 PKE
현재 주류 PEPS 솔루션은 BLE(Bluetooth Low Energy), NFC, RFID(고주파 및 저주파) 등과 같은 무선 기술을 통합합니다. 음, 어떻게 작동합니까? 오늘의 이야기를 하자면 소화하기 어려울 것이다. 그럼 어제로 돌아가보는 건 어떨까요?
1990년대 말 일부 고급형 자동차 모델은 저주파 RFID(125KHz)를 기반으로 하는 이전 IMMO(이모빌라이저) 솔루션보다 진화한 RKE(Remote Keyless Entry) 시스템을 단계적으로 도입했습니다. PEPS의 전신인 RKE는 UHF(초고주파) 신호를 차량의 BCM(Body Control Module)과 연결된 RF 수신기로 전송하여 사용자 신원을 확인하는 열쇠 고리를 가지고 있습니다. ID가 확인되면 시스템은 BCM에 의해 구동되는 문 열기/닫기 작업을 실행합니다. 그림 1과 같은 단방향 검증 메커니즘은 첩보 영화에서 미리 설정된 암호로 해석할 수 있다. 방문 비밀 요원이 회의장에 오면 그러한 암호를 말하거나 보여주어야 합니다. 암호가 맞으면 들어갈 수 있습니다. 이 메커니즘의 단점은 적이 침투하여 암호를 얻은 후
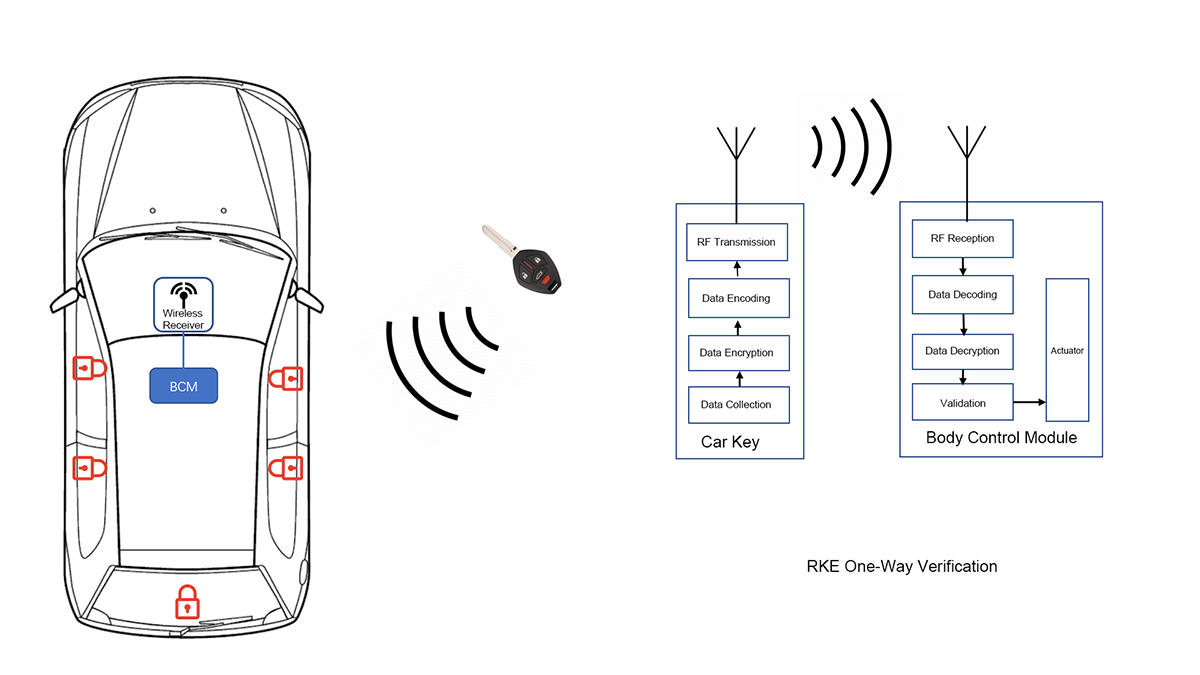
그림 1. RKE의 작동 메커니즘
RKE 솔루션은 315MHz(미국, 중국, 일본 등), 433.92MHz(유럽, 중국) 및 868MHz(유럽)의 주파수 대역을 채택하고 있으며, 신호 변조 측면에서 대부분의 국가에서 ASK(진폭 편이 변조) 방식을 채택하고 있습니다. ) 모드인 반면 일본은 FSK(주파수 편이 방식) 모드를 채택하고 있으며 Silicon Labs, Maxim, Microchip 및 NXP 등과 같은 IC 공급업체가 이 분야에서 제품을 제공하고 있습니다.
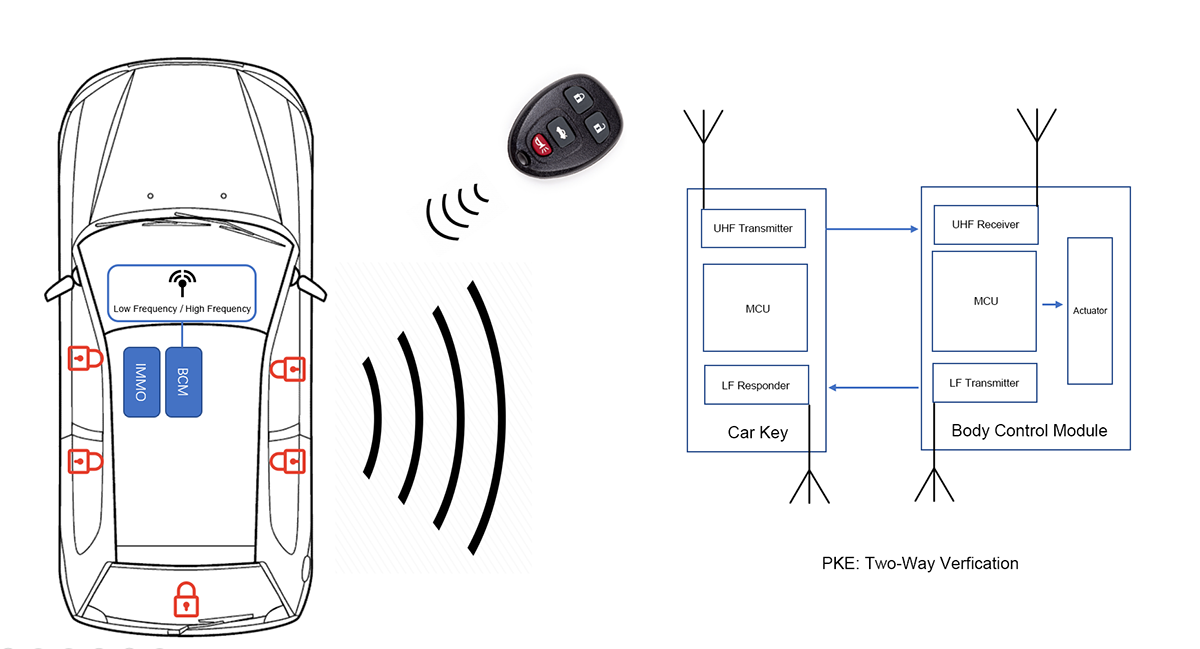
그림 2. PKE의 작동 메커니즘
오늘날: Bluetooth PEPS가 주류이지만
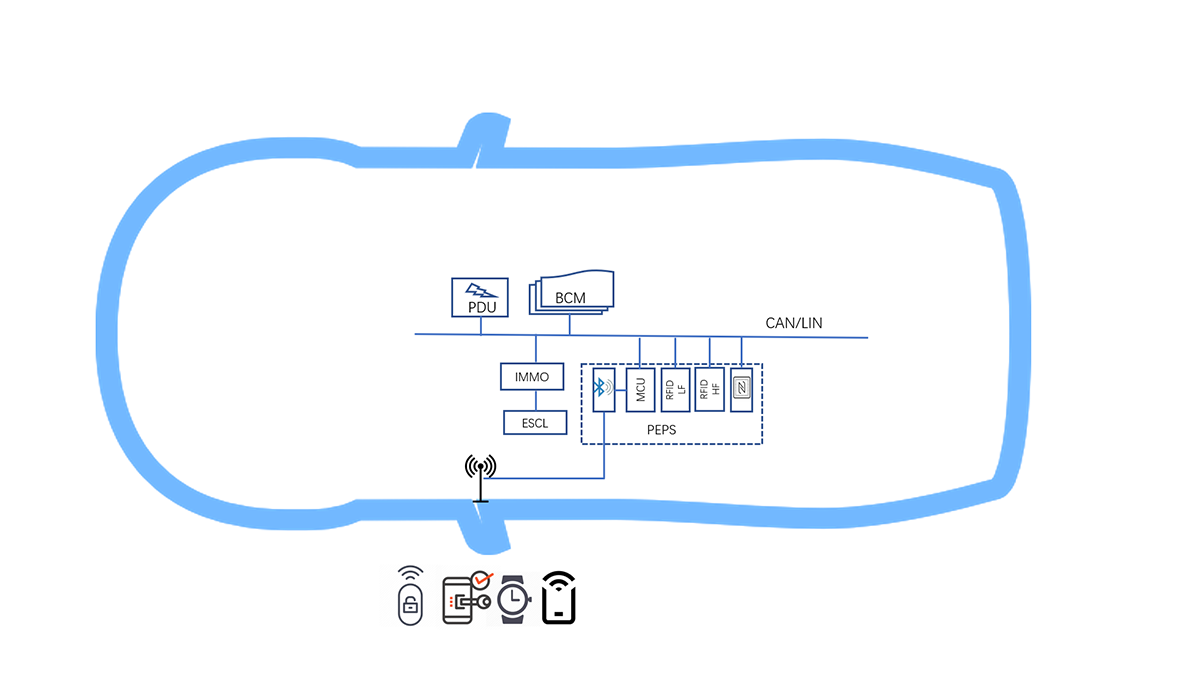
그림 3. 보급형 Bluetooth PEPS 체계(RSSI 단일 스테이션)
주류 PEPS 구현을 위한 AOA 기술
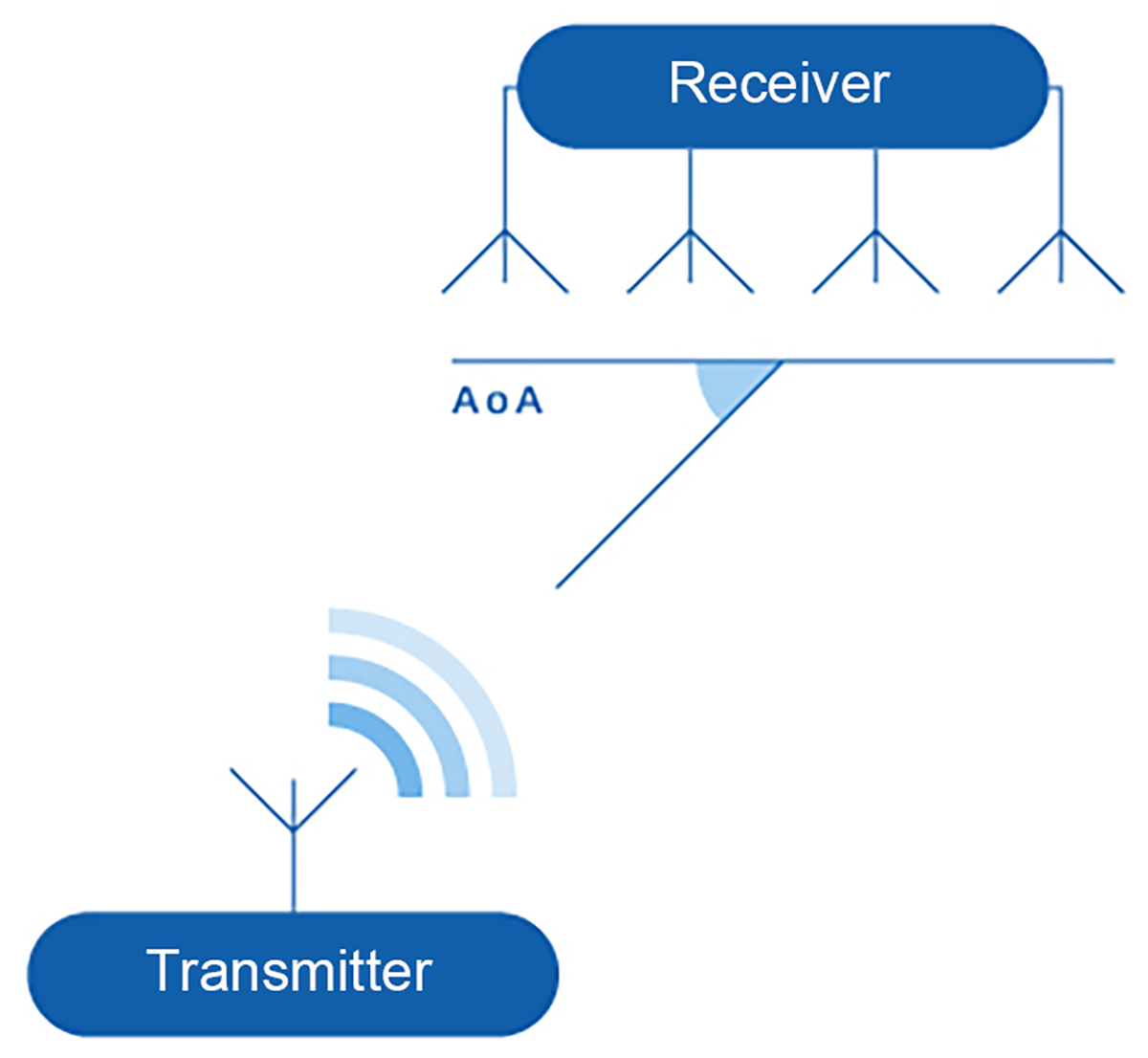
그림 4. 블루투스 AOA 포지셔닝
분명히 포지셔닝의 정밀도 수준을 개선하려면 AoA 알고리즘을 특징으로 하는 여러 Bluetooth 기지국을 지원해야 합니다. 따라서 중간 계층 모델에서 자동차 제조업체는 그림 5와 같이 다중 지점 Bluetooth PEPS를 배포하기로 선택하지만 정확한 기지국 수와 레이아웃 패턴은 자동차 모델마다 다소 다릅니다.
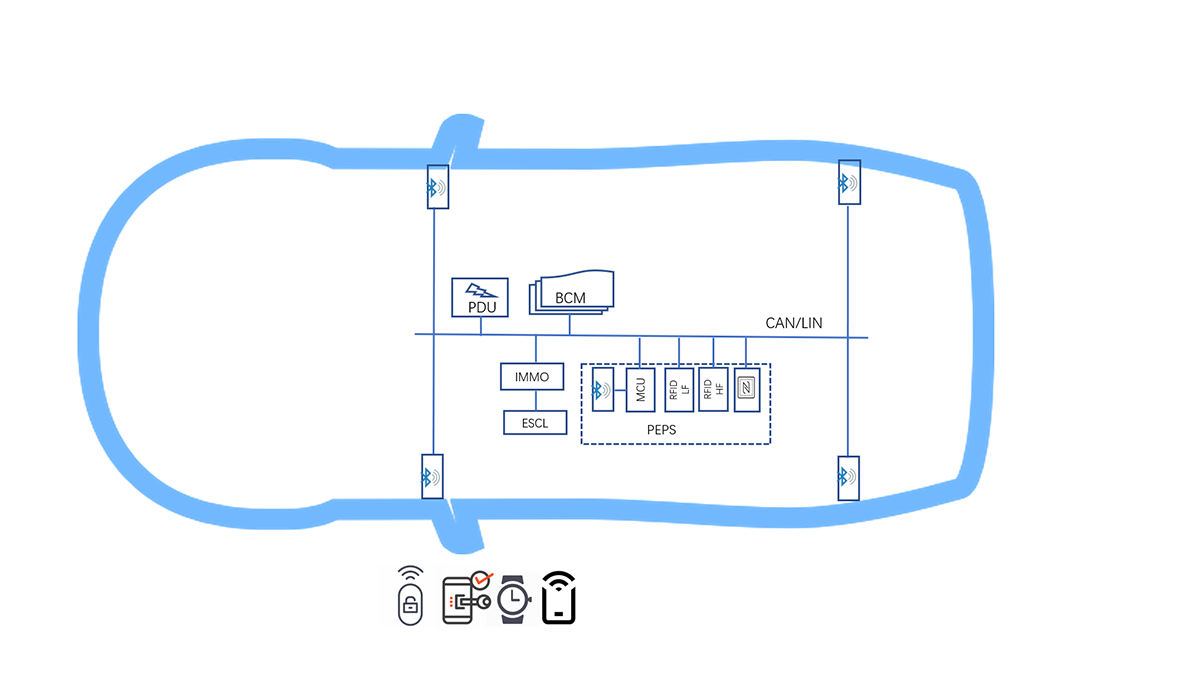
그림 5.주류 블루투스 PEPS 솔루션(AoA 포지셔닝)
Bluetooth PEPS 분야에서 가장 많이 채택된 SoC에는 TI CC2640, Silicon Labs EFR32BG22 및 NXP KW36 등이 있습니다.
내일: UWB is Promising
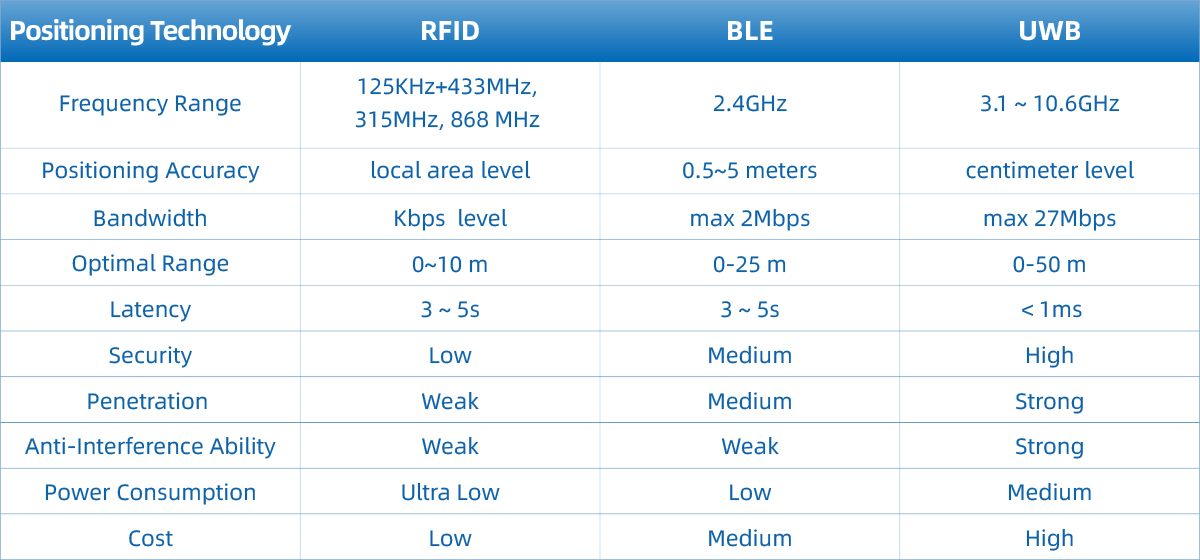
표 1. PEPS 포지셔닝 기술 비교
UWB를 위한 포지셔닝 알고리즘
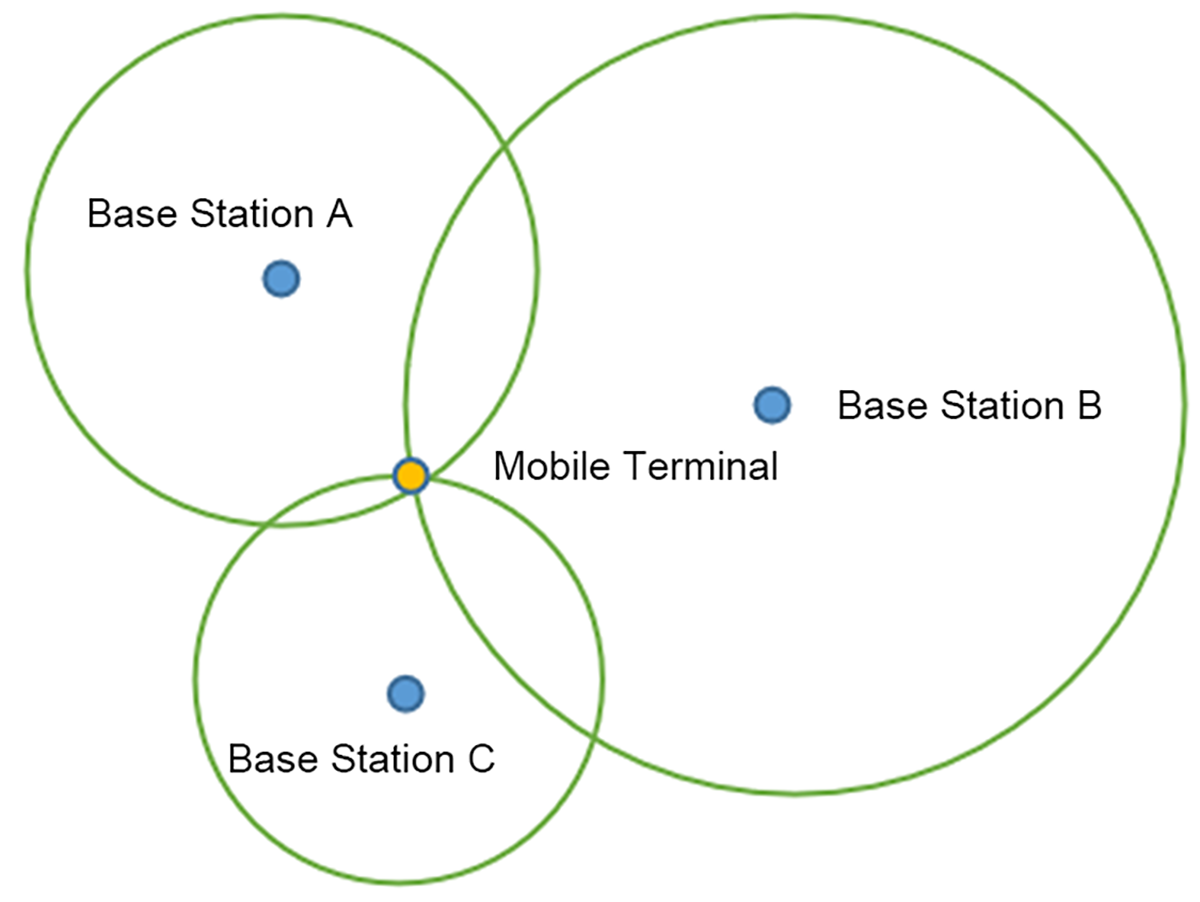
그림 6. TOA 측위 알고리즘(원형 측위 방식)
TOA에 비해 개선된 TDOA는 기지국 간에 정확한 동기화를 수행하므로 구현하기 쉽습니다. 그림 7과 같이 이동 단말기와 기지국 간의 시간 동기화는 관련되지 않습니다. 먼저 이동 단말기와 기지국 A 사이의 거리 차이와 기지국 B와 이동 단말기 간의 거리 차이를 계산합니다. 이동 단말기는 쌍곡선 위에 있어야 합니다. 기지국 A와 기지국 B를 초점으로 합니다. 또 다른 쌍곡선 집합은 이동 단말기와 기지국 A와 기지국 C 사이의 거리 차이로 얻을 수 있으며 쌍곡선의 교점은 이동 단말기의 위치이다. 차량 공간의 범위에서 다중 경로, 소음 등의 영향도 거리 차이를 통해 줄일 수 있습니다.
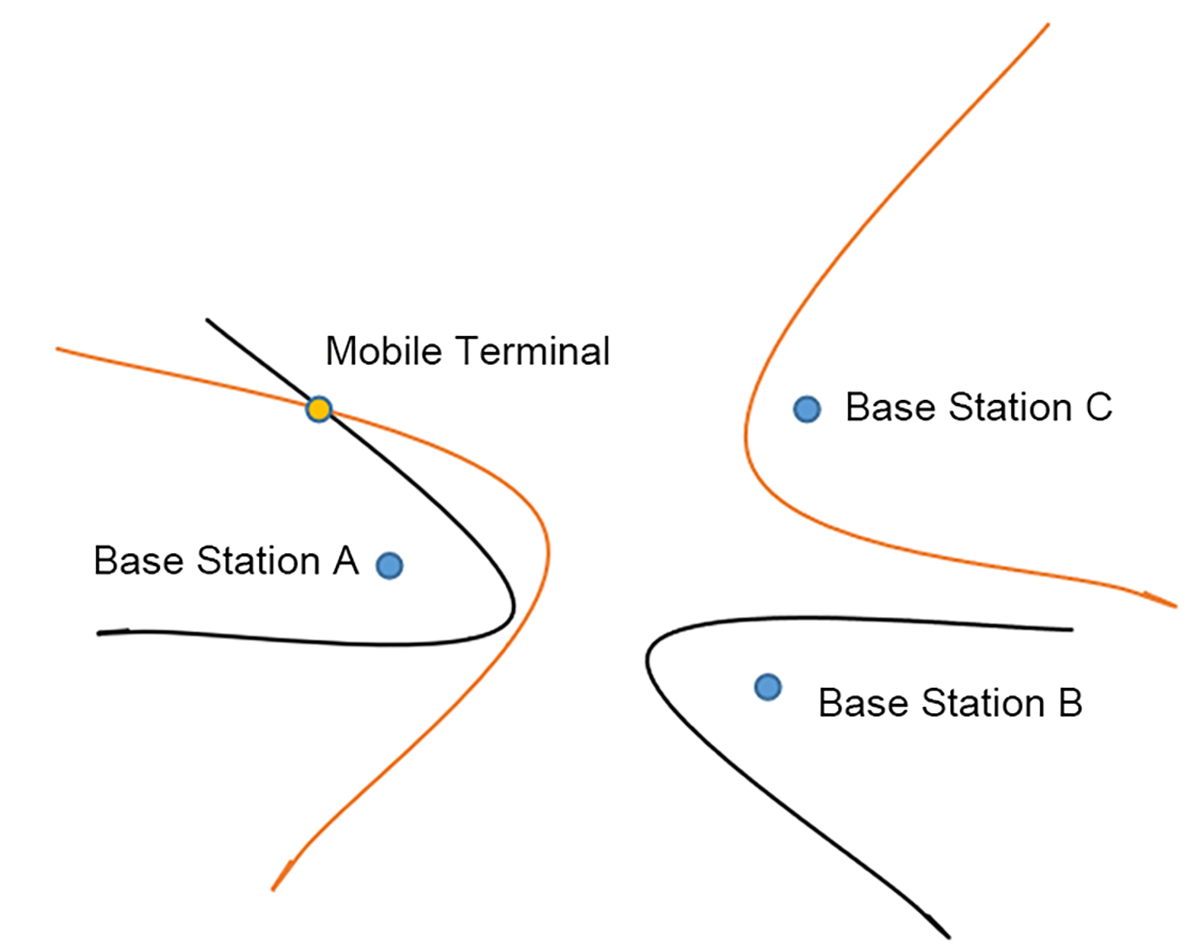
그림 7 TDOA 포지셔닝 알고리즘
AOA 측위는 위상차의 원리에 따라 도달각을 계산하며 측위를 달성하기 위해 두 개의 기지국만 있으면 됩니다. 각도 분해능의 문제로 인해 기지국과의 거리가 멀어질수록 측위 정확도가 떨어지며, 주로 근거리 및 중거리 측위를 위해 사용된다.
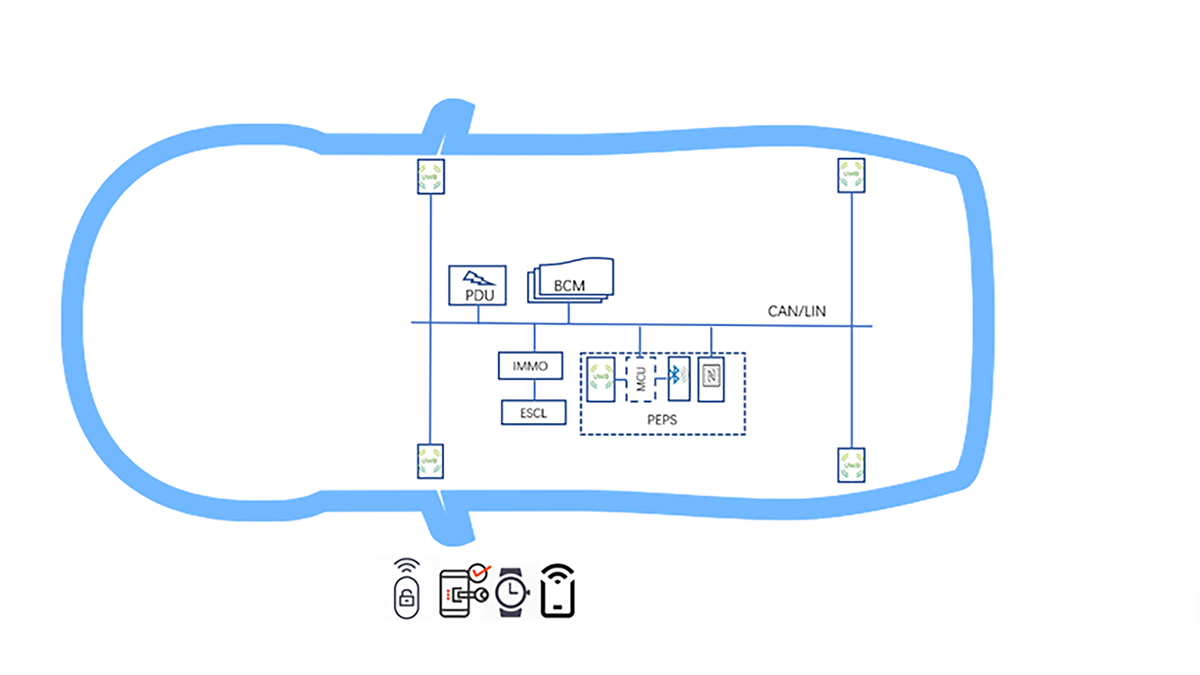
그림 8. CCC 3.0에서 지정한 UWB PEPS의 구현 아키텍처
UWB 칩 분야에서 현재 인정받는 성숙한 제조업체는 Apple, NXP Trimension 및 QORVO Decawave입니다. 출시된 IC 중 NXP Trimension NCJ29D5만 차량 규정 요구 사항을 충족합니다.
확장: 바이오 레이더
운전자를 위한 UWB PEPS의 경험은 친밀하고 안전합니다. 하지만 차에 탄 승객들도 같은 마음일까? 일반적으로 예, 그러나 일부 특별한 경우에는 아니오입니다. 때로는 그들에게 가혹합니다. 예를 들어 운전자가 차에서 내리면 문이 자동으로 잠깁니다. 아기나 귀여운 애완동물이 실수로 차에 남겨졌습니다. 자동차가 운전자에게 경보를 보내야 합니까? 꼭 필요한! 다행히도 UWB에서 잘 해결할 수 있습니다.
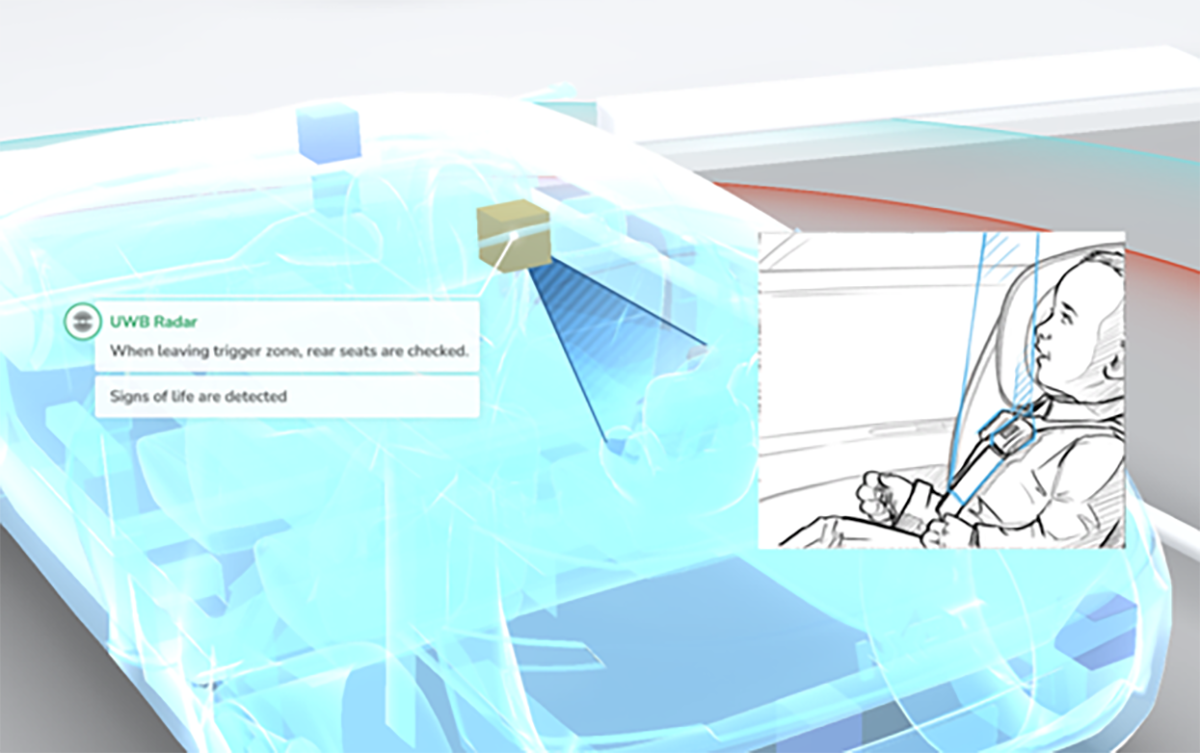
그림 9. UWB Bio-Radar로 생명 감지
트렁크: 킥투오픈
UWB 레이더의 동작 인식 기능을 기반으로 하는 차량 내 수명 감지 외에도 UWB는 트렁크를 열기 위해 쿵쿵 거리는 영리한 응용 프로그램을 가지고 있습니다. 운전자의 신원이 차량 후방에 도달하면 UWB 레이더가 쿵쿵거리는 동작을 정확하게 감지하여 자동으로 차량 트렁크를 엽니다.
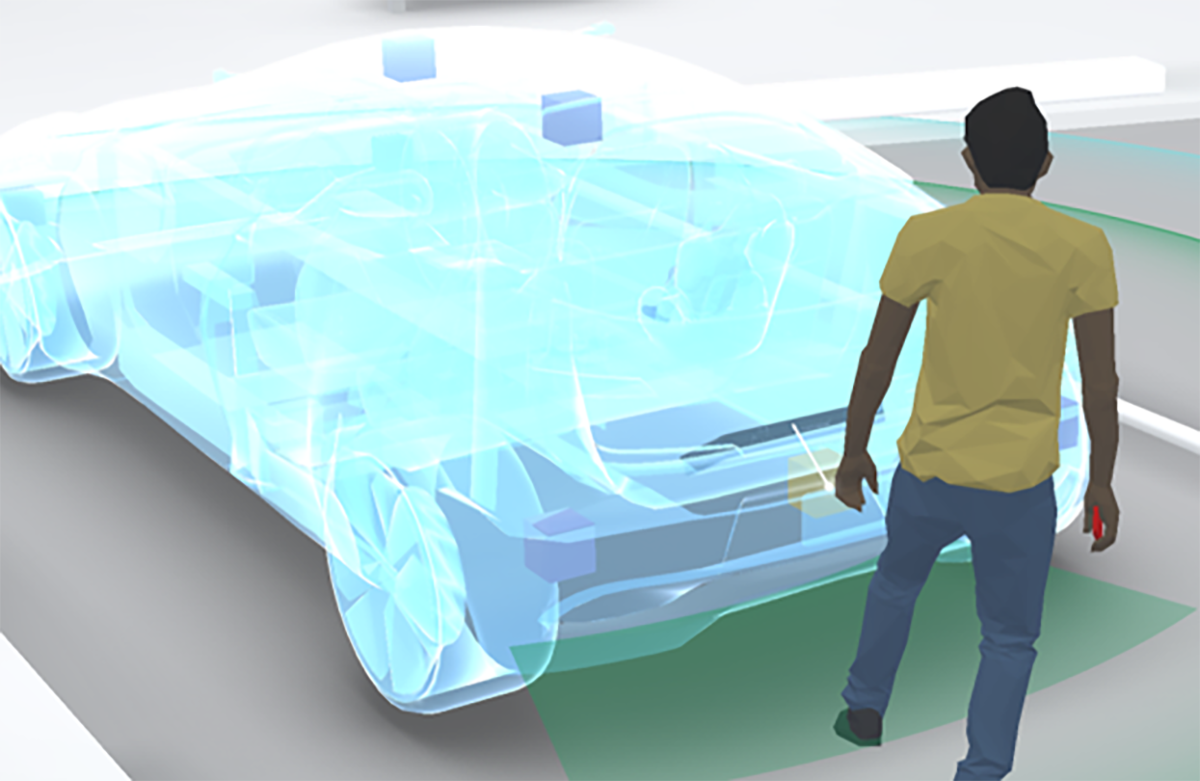
그림 10. UWB를 통한 Kick-to-Open 솔루션
UWB 바이오 레이더와 UWB 킥 레이더를 포함하여 위에서 설명한 두 가지 UWB 레이더 기능은 추가 하드웨어가 필요하지 않으며 추가 하드웨어 비용을 추가하지 않고 차량 측 UWB 하드웨어를 재사용함으로써만 구현됩니다. 미래의 UWB PEPS 기능의 일부로 고려할 수도 있습니다.
UWB 지원 자동 발렛 파킹
AVP(Automated Valet Parking)는 자동 발렛 주차 기능입니다. 사용자에게 "라스트 마일 자유"를 제공하는 L4 수준의 자율 주행 기술로 알려져 있습니다. 그림 11과 같이 현재 상용화를 위한 가장 유망한 자율 주행 응용 프로그램 시나리오입니다. UWB로 PEPS 경험을 구현하는 또 다른 큰 이점은 자동차 측면에서 AVP를 구현하는 데 필요하고 충분한 조건을 제공한다는 것입니다.
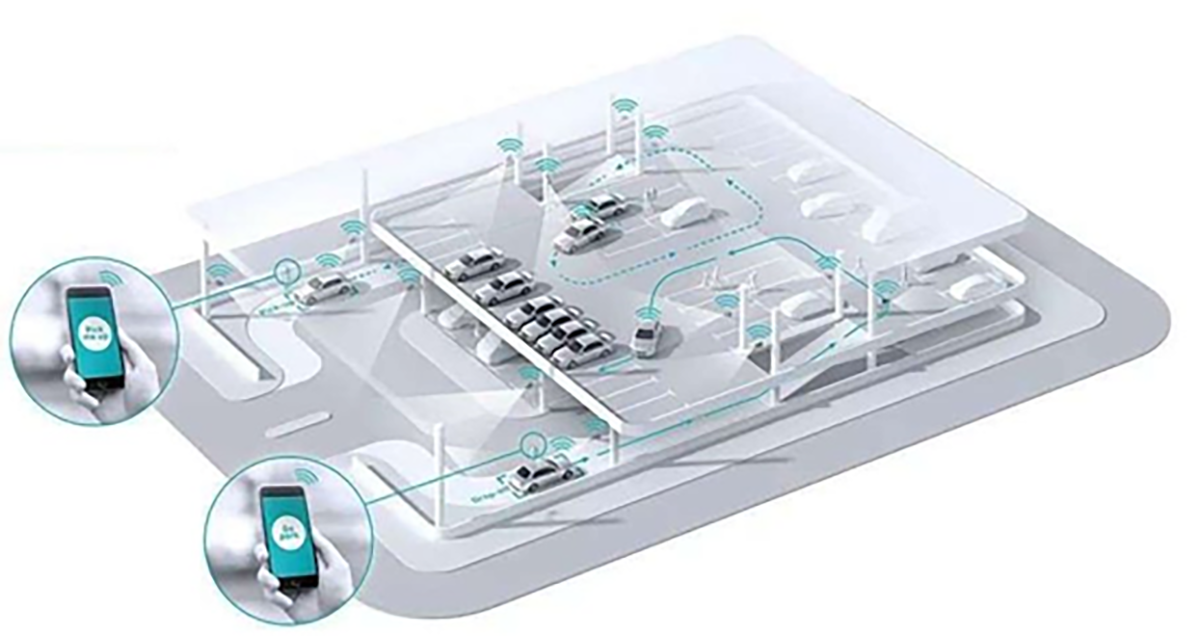
그림 11 자동 주차 대행 시스템
그림 12는 실현 가능한 차량 종단 UWB 노드 레이아웃 방식을 보여줍니다. 총 4개의 UWB PEPS 노드가 헤드라이트와 테일라이트에 배치되고 다섯 번째 UWB PEPS+AVP 노드가 루프에 배치됩니다. 다섯 번째 노드는 차량 내부의 UWB 신호와 차량 외부의 UWB 신호를 모두 수신할 수 있으며 AVP 기능을 구현하는 핵심 노드이기도 합니다.
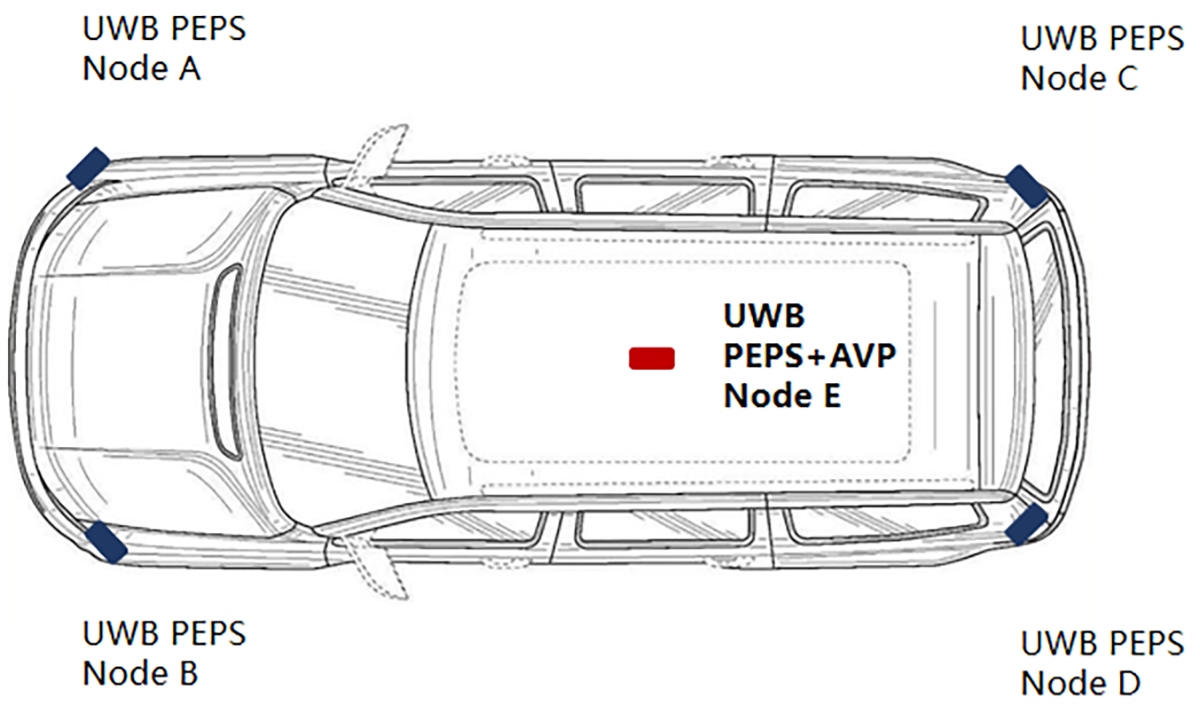
그림 12 PEPS + AVP의 아키텍처
PEPS 모드에서 다섯 번째 UWB 노드는 다른 4개의 UWB 노드와 협력하여 스마트 키의 위치 측정을 완료하고 레인징 정보를 BCM(Body Domain Controller)에 전송하여 스마트 키의 위치 계산을 완료합니다. 키를 눌러 후속 잠금 해제를 결정하고 작업을 시작합니다.
결론
Shenzhen HQ: Room 503, Podium Building No. A-12, Shenzhen Bay Science and Technology Ecological Park, Nanshan District, Shenzhen, Guangdong, China, 518063
Chengdu Branch: N2-1604, Global Center, North No. 1700, Tianfu Avenue, Hi-Tech District, Chengdu, Sichuan, China
전화 : +86 (0)28-86925399
이메일 : info@szrfstar.com
Teams : Sunny Li
Whatsapp : +8618190842785




















